基于雙熱電偶的瞬態流體溫度測試方法研究
發布時間:2022-04-13
瀏覽次數:
摘要:針對目前航空發動機空氣系統瞬態溫度測試頻響的需求,提出一種基于
雙熱電偶的瞬態流體溫度測試方法。該方法利用兩個結點大小相同但材料不同的熱電偶測量流體同一空間點的溫度,并基于集總參數法反推出流體真實溫度,并給出考慮誤差的后處理算法。基于固體導熱數值計算,驗證此方法的可行性及相關后處理方法的可用性。采用雙熱電偶裝置,對管道流動溫度變化進測量,基于微細熱電偶的測量結果標定兩支熱電偶的物性參數比,應用后處理程序實現流體溫度的反推。試驗結果表明:標定段的反推流體溫度平均測量誤差率為0.52%,校驗段的反推流體溫度平均測量誤差率為1.6%,反推流體溫度的響應速度與微細熱電偶響應速度相當。
0引言
在一些復雜系統中,瞬態演化機理的研究是必不可少的,如在柴油機中,需掌握燃氣的瞬態溫度變化,從而充分有效地利用排氣脈沖能量,提高柴油機的效率";在航空發動機起動、加速和失效過程中,尤其是在渦輪軸突發性失效時,其瞬變時間量級可以達到毫秒級凹,掌握發動機的瞬態演化機理對于先進發動機的設計和保障飛行器的安全性具有重要作用。流體溫度是瞬態演化機理關注的重要指標之一,其穩態測試已日趨成熟,而瞬態測試則--直是個難題。當被測氣流溫度快速變化時,為實時正確測量氣流溫度,就需要溫度傳感器能快速地響應。實際溫度傳感器都存在熱慣性,不能立刻反映氣流溫度的變化。熱電偶是流體溫度測試中常用的溫度傳感器,具有結構簡單、測量精度高、可靠性強的特點,得到了廣泛的應用。熱電偶在測量穩態溫度時,測量結果正確,但是在測量瞬態溫度時,由于有熱慣性,其測量結果滯后于流體溫度變化。市面上普通的熱電偶響應較慢,通常在0.1~5Hz范圍內4。而一些響應較快的熱電偶,如
微細熱電偶、響應速度可以達到微秒量級,但由于其造價高昂,采購周期長,在復雜環境中易損壞而無法得到廣泛的應用。
雙熱電偶法測量瞬態溫度前人已有研究。采用雙熱電偶絲和三熱電偶絲方法測量柴油機排氣溫度波,利用材料相同但大小不同的2~3個熱電偶絲進行測量,但在數據處理過程中,采用了對流換熱系數與偶絲直徑和雷諾數的經驗關系式,這種關系式有其適用域,并需要掌握相關無量綱參數關系。在國外利用材料相同直徑不同的雙熱電偶進行測量,采用時域估計方法、頻域估計方法、卡爾曼濾波法和預測時間常數法等方法對時間常數進行了估計,這些方法都采用了直徑為微米量級的偶絲來測量具有規律溫度變化的溫度場,通過得到熱電偶的平均時間常數來反推流體的實際溫度,但這些方法容易受到干擾,對瞬態尤其是變時間常數的溫度測試應用效果不明顯。針對上述問題,本文提出了一種既能提高響應速度,又能適應復雜環境的雙熱電偶瞬態流體溫度測試方法,并基于雙熱電偶理論制備了雙熱電偶裝置,對雙熱電偶系統進行了試驗研究。
1測溫原理
雙熱電偶法是通過兩個相同尺寸大小,但不同材料(即密度比熱容、導熱系數等不同)的熱電偶測量同一空間點的溫度值,通過建立零維傳熱模型,基于集總參數法,實現對動態溫度的測量。
Bi數是衡量固體內部的導熱熱阻和表面的換熱熱阻的一個指標,當固體內部的導熱熱阻遠小于其表面的換熱熱阻時,任何時刻固體內部的溫度都趨于-致,此時可以忽略物體內部的導熱熱阻,這是集總參數法的核心思想。對于熱電偶結點(假設為球體),集總參數的適用條件為:
Bi≤0.033(1)
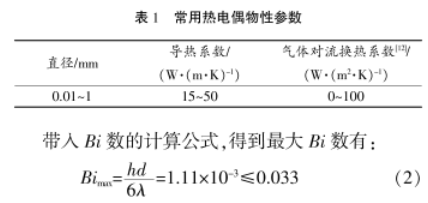
常用熱電偶符合集總參數法的判據,可以采用集總參數法。針對熱電偶結點,假設:
1)熱電偶結點處物性參數不隨溫度變化;
2)不考慮熱電偶間的相互影響;
3)不考慮熱電偶引線對流場的影響;
4)將熱電偶結點處近似看成圓球;.
5)忽略熱電偶內部的導熱熱阻;
6)不考慮熱電偶冷熱端朝向對測溫的影響;
7)不考慮熱電偶與外界空間的熱輻射。
基于集總參數法,熱電偶的導熱微分方程為
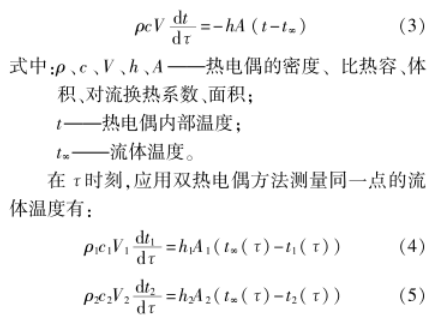
式中:tm(τ)一τ時刻流體的實際溫度;
t(τ)、t2(τ)-τ時刻兩個熱電偶的測量溫度。
熱電偶的幾何尺寸--致(即直徑相同),兩個熱電偶的位置接近,溫度梯度不大,流體流過熱電偶表面時,其Nu數相同,結點的表面對流換熱系數相同,即h1=h2,將式(4)和式(5)做比值可以得到:
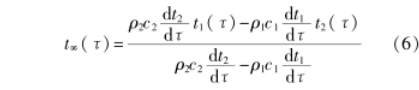
由于假設熱電偶為常物性參數,式(6)中ρ1、ρ2、e1、e2均圯知t1(τ)、t2(τ)為熱電偶所測溫度值,dt1/dτ、dt2/dτ為所測時刻的溫度隨時間的變化率,可通過差分方法求得,通過式(6)可以求得修正后的流體實際溫度值。
熱電偶的動態響應是瞬態測量時必須關注的個性能指標,其快速與否直接影響熱電偶能否及時正確地測量溫度信號的變化。熱電偶的時間常數是影響測溫速度的主要因素,也是衡量溫度熱電偶動態特性的重要指標。其在物理學上的定義是熱電偶自身熱容量與表面換熱條件的比值,即:

實際測量中,給定階躍的溫度變化,測量溫度變化達到階躍幅值的63.2%所用的時間即為時間常數。由于兩支熱電偶所處空間位置認為是同--位置,直徑相等,因此具有如下表達式:

2數值驗證及后處理算法研究
在實際測量過程中,通過數據采集系統得到一系列帶有誤差的時序離散點,同時受采集系統的影響,其存在著一定的分辨率,若直接帶人反推公式,其一階導數誤差較大,反推流體溫度結果不理想。
本文基于ANSYSCFX模塊對兩個熱電偶進行建模,給以同樣的第3類熱邊界條件,進行固體導熱計算,得到固體內部平均溫度隨時間變化規律,分別在理想情況和加入高斯噪聲情況下,利用上述方法驗證雙熱電偶方法的可行性。
以階躍情況為例,此時階躍溫升為40K,在數值計算結果上加入高斯噪聲,其服從N(0,0.01)分布。在無濾波程序直接帶人反推公式的結果如圖1所示。
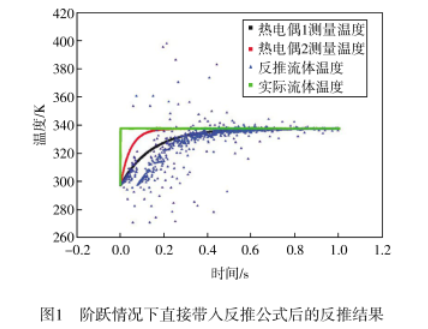
由圖可知,微小的噪聲會使反推結果與給定實際流體溫度相差較大,顯然不符合實際應用。故通過采集系統采集時序溫度信號后,需要對采集到的時序離散點進行濾波及平滑化后處理。
針對雙熱電偶法反推流體溫度的特殊設計,本文提出基于樣條擬合方法的最小二乘法曲線擬合得到反推溫度的曲線。主要思路是對兩個熱電偶的測量值選取一-定量N的控制點,通過對控制點進行樣條插值,得到時域內所有點的擬合值,將擬合值與測量值作差,通過離散牛頓法控制二者的偏差最小,從而達到數據擬合的目的。利用平滑后的兩條熱電偶擬合曲線帶人雙熱電偶反推模塊進行計算輸出。本文基于Matlab程序中的interp1及spline指令開發出可應用于通用溫度變化的數據后處理程序,其邏輯框架如圖2所示。

需要注意到,在后處理過程中由于反推公式中存在除法運算,要盡量避免分母中的絕對值遠遠小于被除數的絕對值。對應于反推式(6),即有當
當K趨于1時,式(6)的舍人誤差較大,因此在程序中設定當|K-1I≤0.05時,輸人點不帶人反推公式中計算。
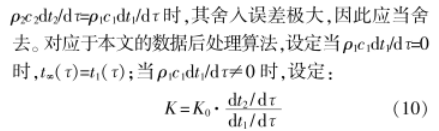
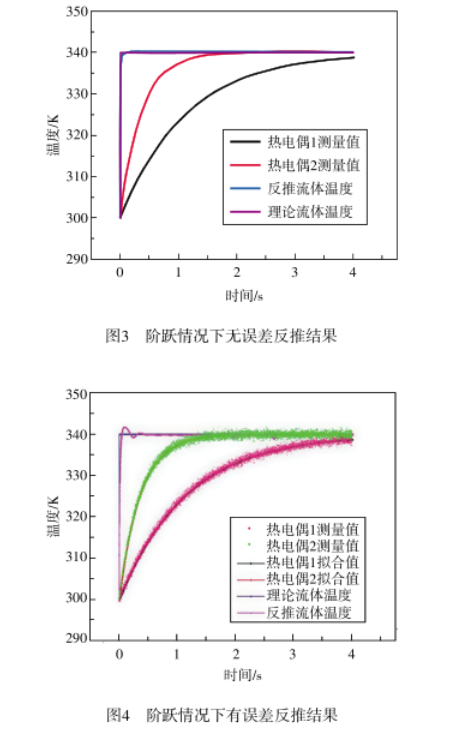
基于該后處理算法,同樣在階躍變化的條件下,分別對有無誤差情況得到的反推流體溫度曲線進行對比,其反推結果如圖3圖4所示。
由圖3可知,在階躍情況下,兩個熱電偶對流體溫度的響應相對遲緩,熱電偶1在4s之后才能達到穩定值,熱電偶2在1.8s之后可以達到穩定。根據時間常數的定義"有,時間常數為當熱電偶的過余溫度達到初始過余溫度的36.8%時的時間,對應于本文給定的情況即為在溫度達到325.3K時所對應的時間即為時間常數。熱電偶1的時間常數為1.144s,熱電偶2的時間常數為0.361s,類比于時間常數定義,雙熱電偶方法對應的反推溫度到達階躍后溫度的63.2%需要的時間為0.01s,其響應時間較熱電偶1和熱電偶2大大縮短。在無誤差情況下,反推結果明顯好于單熱電偶所測結果。
由圖4可知,在考慮誤差的情況下,基于Matlab后處理程序擬合出來的兩個熱電偶的擬合曲線與理論值相符,且曲線光滑,但帶人反推公式后,可以發現反推流體溫度存在著局部波動情況,尤其是在0.09s時刻,其反推溫度為341.8K,較穩定溫度相差1.8K。與無誤差情況比較可以發現,誤差會影響反推結果的光滑性,并且由于樣條誤差的引入使得結果存在一定的偏差。通過增加單熱電偶的允許誤差,可以使這種偏差降低。
通過數值計算,驗證了雙熱電偶方法的可行性,同時通過設計后處理算法,減少了誤差對反推結果的影響。
3試驗驗證
3.1測試系統
測試系統主要包括傳感器、信號調理電路、A/D轉換模塊、數據采集和存儲模塊、接口模塊.上位機、電源管理模塊、電路控制模塊數據采集軟件、數字濾波器、數據處理程序等。其連接圖如圖5所示。

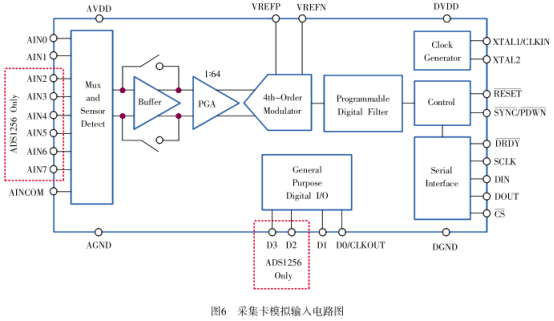
本試驗采用一-款基于USB通信的多功能高精度數據采集卡,如圖6所示,采用24位分辨率ADS1256芯片,可直接測量毫伏級的信號,無需增加放大電路減少了非線性誤差。具有多路復用器的極低噪聲A-ZABC,8個虛擬輸人通道,單通道數據采集頻率可以達10kHz,能夠正確地反應并采集熱電偶的熱電勢對階躍溫度的響應情況。程控增益放大器(PGA)為輸入端提供最大64倍的增益放大。
本文在上位機中采用LabVIEW軟件實現對熱電偶的數據采集,同時針對采集結果設計了濾波器,調用Matlab的后處理動態補償程序,實現對實際流體溫度的實時輸出及數據存儲。
3.2雙熱電偶裝置制作
基于雙熱電偶法實驗的原理,熱電偶的選型主要依據其熱物性參數存在差異,選取
K型熱電偶和
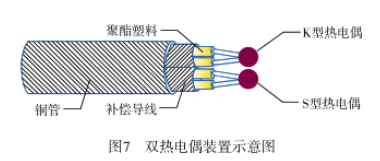
S型熱電偶若干,選擇兩型熱電偶絲直徑為0.5mm。焊接前捋直偶絲并分別利用直流電源進行焊接,焊接時注意控制所需要的電壓,使焊接結點盡量為球型,焊接多支并用螺旋測微器測量其結點直徑,記錄并選取其中結點直徑差距最小的K型熱電偶和S型熱電偶若干。由于S型熱電偶價格昂貴,采用補償導線的方法用高溫膠帶連接。兩支熱電偶分別用聚酯塑料包裹并用卡殼固定二者的距離,選擇合適直徑的銅管作為保護管,并將兩支熱電偶套人其中。雙熱電偶裝置示意圖如圖7所示。
3.3試驗設備
本文利用自制標定過的雙熱電偶裝置(偶絲直徑為0.5mm,結點直徑為1.024mm,兩支熱電偶的結點差異度低于0.2%)和偶絲直徑為0.025mm,結點直徑為0.053mm的
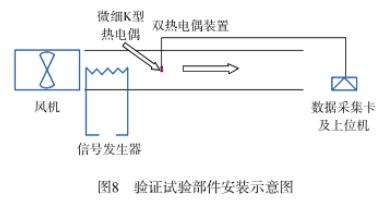
微細K型熱電偶絲(經校準時間常數為毫秒量級)測量管道中流場的溫度變化,實驗裝置如圖8所示。軸流風機轉動吹人直徑為30mm的圓柱形通道,利用旋轉開關控制風機的轉速大小,在通道中安裝電熱絲給流場加熱,利用可控硅來控制電熱絲發熱功率的大小及變化情況,試驗過程中為實現溫度變化隨機調整電熱絲的發熱功率。雙熱電偶裝置和微細熱電偶絲安裝在距離電熱絲30mm處的管道中心位置。試驗開始后雙熱電偶裝置和微細熱電偶絲將得到的電勢信號通過數據采集系統導人到上位機中進行處理。
3.4物性參數比的標定
針對式(9),其物性參數比K0是一個未知量,常用處理方法是分別對兩型熱電偶的物性參數(密度與比熱等)進行測量,得到物性參數的經驗關系式。比熱容的測試方法主要包括混合法、電熱法、定流量加熱法、差動式量熱法、間接法回等;密度的測試方法主要有流體靜力稱衡法或比重瓶法等。雖然測量物性參數的方法眾多,但得到的測量結果受溫度的影響不夠準確且步驟繁瑣。
由于本文僅需標定熱電偶的物性參數比而無需對每個熱電偶的密度與比熱進行測量,因此本文基于低慣性熱電偶在標定工況內的流場溫度測量來標定物性參數比。由于微細熱電偶絲的熱容非常小,可以忽略不計,因此可以將微細熱電偶絲的溫度t0(τ)作為流場的實際溫度,計算每時刻對應的物性參數比,算出選定時間域內的算術平均值。將得到的平均物性參數比作為標定初值帶人到后處理程序中,基于最小二乘法原理使反推流體溫度和微細熱電偶絲測量溫度的偏差最小,從而得到最終的標定物性參數K0。將這一工況標定到的物性參數比外推到其他工況,或者在同一工況中選取某些時間段的物性參數比外推到其他時間段,校驗反推熱電偶溫度與微細熱電偶溫度的偏差,從而實現對該雙熱電偶方法的驗證。
標定工況下的3~4s時間段內的部分熱電偶溫度測量值如表2所示。
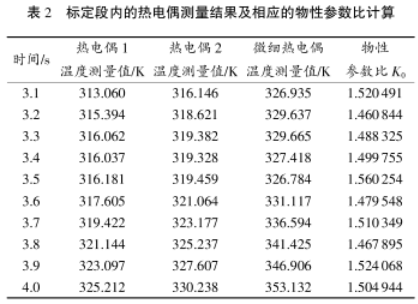
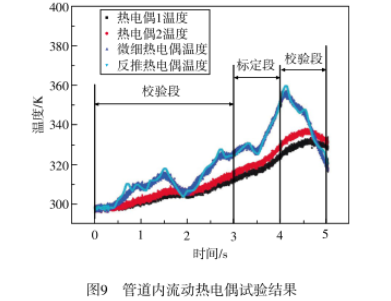
得到該時段內的兩型熱電偶的平均物性參數比`K0=1.5016473,將該初值賦人后處理程序,基于最小二乘法得到的最終物性參數比K0=1.4935412。將此物性參數比外推到其他時刻后的溫度變化曲線如圖9所示。
3.5試驗結果分析
由圖9可知:微細熱電偶絲所測溫度曲線是波動的,線性不好。這是因為在試驗過程中為突出流體溫度變化,其加熱功率Q是一一個隨時間變化的量,從而導致管內流體溫度出現波動,而微細熱電偶所測流體溫度能夠反映出這種波動變化,證明其響應速度較好,而兩支大尺寸熱電偶由于熱響應較慢,導致其溫度響應曲線趨于平緩并不能正確地反映出流體的波動狀態。由上述后處理方法處理得到的反推熱電偶溫度曲線與微細熱電偶絲測量得到的溫度曲線符合較好,而且可以發現在0~1s的升溫階段反推熱電偶的溫度響應速度較微細熱電偶絲測量溫度更好,且升溫與降溫過程都能夠較好地反映出動態溫度的變化趨勢。
在標定段內,由于標定熱電偶的物性參數比時采用此時間段內的溫度測量值,因此這--時間段內的流體反推溫度與微細熱電偶測量的溫度貼合最好,微細熱電偶絲擬合溫度曲線與反推溫度曲線的最大誤差為1.78K,均方根誤差為0.42K,平均測量誤差率為0.52%。
在校驗段內,反推流體溫度曲線大致可以反映真實流體溫度的變化情況,但由于后處理程序中采用了樣條擬合的方法,使得反推流體溫度曲線局部存在波動,這種波動會直接影響流體溫度的反推從而導致反推結果存在一定的誤差,此工況下校驗段內的最大誤差為4.92K,均方根誤差為1.26K,平均測量誤差率為1.6%,但相較于兩支熱電偶與微細熱電偶絲的溫度差異要好得多。
兩支熱電偶的直徑較微細熱電偶絲的直徑大了一個數量級,由兩支熱電偶反推得到的流體溫度線與微細熱電偶絲的響應速度相當。通過此實驗可以驗證采用雙熱電偶方法反推得到的流體溫度能夠正確地反映出流體溫度的動態變化,應用大慣性的兩支結點直徑相同的熱電偶可以有效提高其熱響應速度。而且由于熱物性參數是與對流換熱系數無關的值,因而對應于不同的應用場景,不需要重復標定熱電偶的物性參數比,解決了微細熱電偶絲在-一些復雜環境中容易損壞的問題,實現在一些惡劣測量環境下的動態溫度測量。
4結束語
本文研究并論證了采用相同直徑不同材料的熱電偶來測量瞬變流體溫度的可行性,基于數值計算研究了適用于此方法的后處理濾波程序,采用偶絲直徑0.5mm的K型和S型熱電偶制作了雙熱電偶裝置。基于某時間段內的溫度測量數據,簡單方便地標定了兩型熱電偶的物性參數關系。將其他時間段內的雙熱電偶裝置反推溫度與小慣性K型微細熱電偶測量溫度結果進行比較,從而得到大慣性雙熱電偶裝置通過反推溫度可以達到和小慣性熱電偶絲同一量級的時間常數的結論,平均測量誤差率優于2%。該測試方法和后處理系統提供了-種瞬態流體溫度測試的新手段。