熱電偶冷熱端動態特性對測溫精度影響
發布時間:2022-03-21
瀏覽次數:
摘要:反映
熱電偶傳熱特性的時間常數是一個影響熱電偶測溫動態誤差的大小的重要參數,往往會導致熱電偶動態過程測量精度較低和控制系統的實時性較差等后果。以某型發動機排氣測溫傳感器為原型,開展了模型仿真和驗證試驗技術研究,得到了一種熱電偶測溫時城特性的分析方法,有助于發動機控制系統控制算法、超溫保護策略優化和選代。
1模型建立
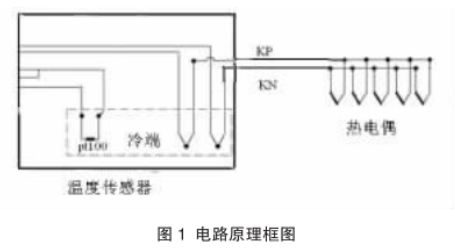
某發動機排氣溫度測量中,熱端采用5支
K分度熱電偶,冷端采用pt100溫度傳感器,電路原理框圖見圖1。
1.1熱端輸出模型
1.1.1仿真模型建立
利用FloEFD軟件對傳感器模型進行網格劃分,模型進行網格劃分,如圖2所示。
1.1.2參數的設定
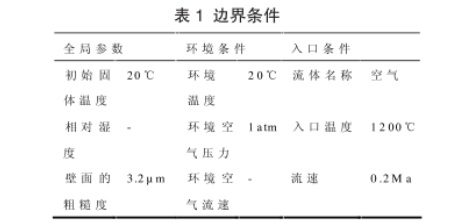
傳感器的端蓋.連接管等零件材料為不銹鋼1Cr18Ni9Ti,套管、端蓋熱電極殼體等零件材料為高溫合金3039,熱電極內部填充材料為氧化鎂粉。按表1所示設置流體熱力學仿真分析邊界條件。氣流方向垂直于熱電極軸向。
1.1.3熱端仿真結果及分析
根據上述前處理方法設置傳感器的時間常數仿真分析,傳感器熱結點處表面平均溫度隨時間的變化規律如圖3所示。
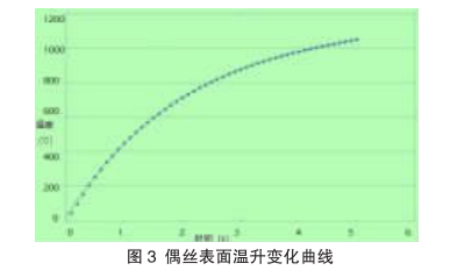
式1為傳感器熱電偶絲熱結點(即傳感器測溫結點)平均溫度隨時間變化的擬合公式。其中,T熱為溫度,t為時間。根據公式可知,傳感器熱電偶絲熱結點的表面平均溫度升至765.76℃時,所需的時間t為2.3s,該時間即為傳感器的時間常數,當t接近6.8s時,傳感器達到熱平衡,其響應溫度接近于氣流溫度1200℃。

2.2冷端模型
2.2.1仿真模型的建立
利用FloEFD軟件對傳感器模型進行網格劃分。
2.2.2傳感器材料參數的設定
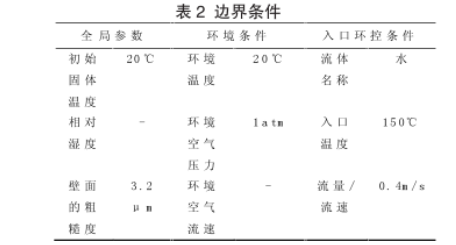
傳感器外殼材料為不銹鋼1Crl8Ni9Ti,內部填充材料為玻璃纖維,感溫元件為pt100鉑電阻。按表2所示設置流體熱力學仿真分析邊界條件。流體速度方向垂直于測溫端軸向。
2.2.3仿真結果及分析
根據上述前處理方法設置傳感器的時間常數仿真分析,傳感器鉑電阻處表面平均溫度隨時間的變化規律如圖4所示。
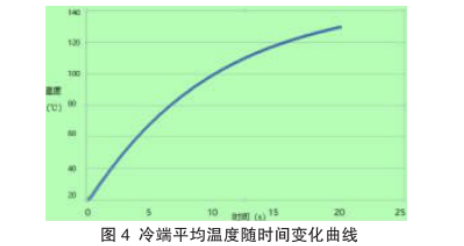
式2為傳感器鉑電阻平均溫度隨時間變化的擬合公式。其中,T冷為溫度,t為時間。根據公式可知,傳感器測溫表面平均溫度升至102.16℃時,所需的時間t為10.6s,該時間即為傳感器的時間常數,當t接近27.9s時,傳感器達到熱平衡,其響應溫度接近于氣流溫度150℃。

2.3傳感器動態綜合精度
系統的最終輸出溫度T輸為冷熱端溫度之差,根據式2和式3得出T輸出如式3所示:

3試驗驗證
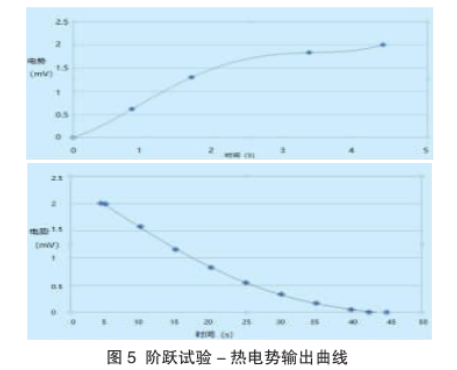
將熱端和冷端同時從室溫放人100℃水槽內,通過時間常數測試儀和電勢信號存儲記錄儀分別記錄電阻變化曲線和熱電偶輸出電壓曲線變化.得出的結果見圖5。
4結論
根據試驗結果可知,冷熱端響應試驗的與仿真分析的趨勢一致。在4.375s之前由于熱端響應快于冷端補償的響應.輸出電勢急劇上升,在4.375s時達到峰值,在4.375s之后由于冷端補償逐漸響應,輸出電勢有所回落,直至冷端補償穩定后才趨于穩定。本文通過仿真分析和試驗對某發動機排氣測溫動態精度進行了研究,可為發動機控制系統溫度測量提供一種溫度測量的時域分析方法,有助于控制算法、超溫保護策略優化和迭代。