階躍溫度場在熱電偶時間常數測試中的應用
發布時間:2021-01-12
瀏覽次數:
摘要:傳統的采用機械方式將
熱電偶投擲到溫度場熱中測量電偶時間常數的方法,由于時間上的延遲,無法測量ms級、甚至us級熱電便的時間常數,為此,提出了1種熱電倡時間常數測試系統,該系統以大功率半尋體微光翠為階躍溫度場的激勵信號對熱電倡加熱,利用紅外探測器反贊控制模塊實現加熱過程濕度場的控制。實驗結果表明:提高激光器輸出功率密度可以在50ms內產生1126C險躍高溫場;利用反饋控制模決可以在熱它傅達到其一溫度階躍后,使然它偶及收熱量和散失熱量達到動態平衡;測得其接點外露型熱電偶在標況下階躍溫度為700℃時的時間常數為446ms。
熱電偶測溫因其測溫正確、成本低、測溫范圍廣、使用方便等優點在社會生產中被廣泛使用"。當熱電偶的輸入信號為隨時間級慢變化的動態信號時,傳感器能夠相刈容易且時刻跟蹤輸入信號,但隨著輸入信號的變化頻率加快,傳感器的隨動跟蹤性能會逐漸下降,這時就需要選用時間響應小的熱電偶。所以,測量熱電偶的響應時間并且根據要求選擇相關熱電偶產品,對于具體生產活動測量結果的正確率是至關重要的L4。H前投擲法和公式計算法是2種測暈熱電偶時間常數的常見方法。采用機械方式將熱電偶投擲到溫度場中會產生時間上的延遲,對于ms級、甚至us級的熱電偶,投擲法在測得結果上會產生很大誤差.根本無法正確測得其時間常數。而通過公式理論計算熱電偶時間常數..易受其尺寸、結構、材料等多種因索的影響,尤法保證測得值的正確性。因此研制開發1種測試系統,能夠為時間常數為ms級其至更小量級的熱電偶產生不同理想階躍溫度場,這是非常有必要的.
1熱電偶時間常數
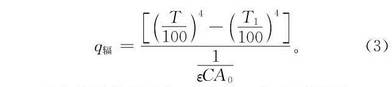
熱交換是熱電偶測量溫度的基礎,又是熱電偶測量誤差的主要來源,它主要包括導熱、對流換熱和熱輻射。在測量端的溫度T高于環境T.的情況下,R為熱電偶的熱阻,其導熱方程可表示為

測量端與氣流直接的溫差(T一Tr)越大,測量端的表而積Ac越大,那么單位時間內它們之問的對流換熱越多

式中:a為對流交換系數或發熱系數;Ag為測量端的輻射換熱面積;(為絕對黑體的輻射系數;e為測量端的黑度,測量端接近黑休的程度,熱電偶輻射換熱表達式為
對流換熱使熱電偶測量端吸熱,輻射換熱和導熱使測量端放熱。當熱電偶示值不隨時間變化而穩定的時候,其達到熱平衡,即

式中:m為測量端的質量;c為測量端的比熱;dT/dt為測量端溫度變化率。由式(1)-式(3)可得:
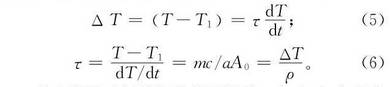
熱電偶的時間常數通常用符號τ來表示,它是熱電偶動態響應誤差與測試溫度變化速率的比值。對式(5)積分,可得到經過時間t后的熱電偶動態誤差為

式中:T為熱電偶指示溫度;T為熱接點初溫;T.為階躍溫度;t為對階躍溫度的響應時間;τ為熱電偶時間常數。由式(7)不難發現,熱電偶的時間常數是按指數規律變化的物理量。當t=τ時,有:

如圖1所示,無論溫度階躍有多大,只要經歷τ秒,熱電偶吸收熱量等于其放出熱量達到動態平衡時,熱電偶指示溫度與其初始溫度之差(Te-To)的63.2%為其時間常數。
此外,也可以根據熱電偶自身屬性定義其時間常數τ為.

式中:V為熱電偶體積;W是熱電偶測溫材料與整個熱電偶的質量比;C為熱電偶總比熱;h是熱電偶總導熱系數;A是熱電偶周測溫端表面積。由式(9)可知,測溫過程中熱電偶結構、尺寸、放熱系數會隨溫度的變化而變化,其時間常數τ值并非1個一成不變的常數,在不同的工作環境下τ對應不同的數值。熱電偶時間常數不僅與自身材料、結構等特性有關,而且還受到測量對象特性的影響。因此,測試某支熱電偶時間常數時,必須同時說明被測介質是什么,以及該介質的其他工作參數,時間常數τ離開了固定工況便失去了它衡量熱電偶性能的意義。
2熱電偶時間常數測試系統
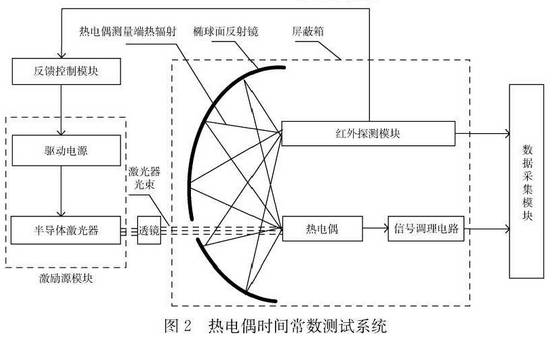
本文提出了1種熱電偶時間常數測試系統,其系統流程圖如圖2所示。利用德國DILAS公司的大功率激光器輸出高能量密度的脈沖激光加熱熱電偶測試端表面,使熱電偶表面產生瞬態階躍溫升。當熱電偶表面達到某--溫度后會繼續吸收激光能量,使熱電偶測試端表面溫度繼續升高。為了使熱電偶在此時實現溫度上動態平衡,即吸收熱量等于散失熱量,本系統采用響應時間低于10us、損傷閾值為5W/cm2、靈敏波長為3~5μm、探測面尺寸為0.64mm2的光電導型碲鎘汞紅外探測器靈敏地捕捉熱電偶表面紅外熱輻,由于紅外探測器的響應速率和精度等特性遠勝于被測熱電偶,因此使用紅外探測器可以靈敏地捕捉到熱電偶表面溫度變化,實現反饋溫度控制。當熱電偶達到設定好的溫度階躍后,通過單次脈沖重復頻率100kHz的LDP-C_200-20電流源驅動,降低輸出激光占空比,進而降低其輸出功率,使熱電偶的放熱等于其接受的熱量,達到動態平衡,這樣就可以得到熱電偶時間常數測試的溫度階躍曲線,實現在不同工況下時間常數的正確測量。
3階躍溫度場分析
通過高能激光對材料加熱為1個比較復雜的物理過程,激光照射到材料表面時,一部分激光被反射掉,另外部分被材料的表層吸收并轉變為熱而使物體溫度升高。被激光照射部分由于吸收能量而溫度升高,變為局部熱源,并按熱傳導定律向周圍進行熱量傳遞[5]。如果把激光加熱電偶放到1個統--的熱平衡系統,在加熱過程中假定材料的基本參數固定不變,且材料具有各向同性,激光人射到材料表面時其光能迅速轉化為內能,不存在時間差,并迅速達到局部平衡。根據能量守恒定律,熱電偶的熱流方程為

式中:T為材料中某點的溫升;λ為材料的熱導率;a=λ/x為表征材料擴散熱量的能力的導熱系數;ρ為材料的密度;C為材料的比熱容;t為激光加熱時間;ΔQ為單位體積、時間的生熱率。假定當激光垂:直照射被加熱材料表面時,光量部分被材料所吸收,且全部轉化為熱能。設此方向為x方向,則熱電偶該點的單位體積、時間生熱率為

式中:m為被加熱材料對人射光的吸收系數;i為單位面積激光的能量密度。假設熱電偶近似半無限體,設熱電偶從坐標原點處沿x正方向無限擴展,則熱電偶的一-維熱傳導方程可以表示為

激光加熱熱電偶過程中,當熱電偶產生溫度階躍并且沒有達到其熔點時,熱電偶x處的溫度變化可用式(14)來表示,對式(14)進行等效變換,則有:

在測試系統中,半導體激光束通過光纖耦合透鏡聚焦到熱電偶表面,通過激光器輸出功率可以得出該圓形光斑的平均熱流密度為

式中:P為激光平均功率;D為表面激光光斑直徑。鋼材料對不同波長的光的吸收率會隨光的波長增加而下降,對980nm激光的吸收率為0.019。同時當溫度升高時,鋼材料對激光的吸收率隨著溫度的升高而增大,綜上考慮,熱電偶對980nm激光的吸收系數μ取5%。假設半導體激光束聚焦到直徑為3mm的保護套是鋼材料的熱電偶表面,DILAS激光器輸出光斑的平均功率取500w,通過以上公式計算可得熱電偶測溫端被加熱光斑表面(即x=0處)的溫度在約50ms后將達到1400℃,也就是說,980nm激光器可以在極端的時間內,在熱電偶表面創造出1個高溫階躍溫度場,這對熱電偶時間常數的測量是極其有利的
熱電偶由不同金屬材料組成,金屬護套熱電偶有3種連接點類型:接地型、非接地型、外露型,其保護外殼通常為鋼材料。鋼材料的熱膨脹系數為11.7X10
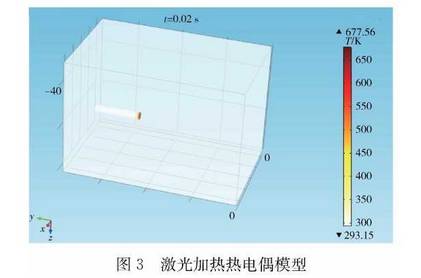
-6in./in.℃,比熱為0.107J/(g·℃),密度為7.86g/cm3,導熱系數為80W/(m·K)。如圖3所示,熱電偶安置于封閉的電磁屏蔽箱中,激光通過屏蔽箱開有的小洞對熱電偶進行垂直照射和加熱,建立68cm×44cm×43cm(長×寬×高)的長方體加熱環境模型,紅色區域為被加熱熱電偶的表面,白色長方體為隔絕熱電偶的屏蔽箱。
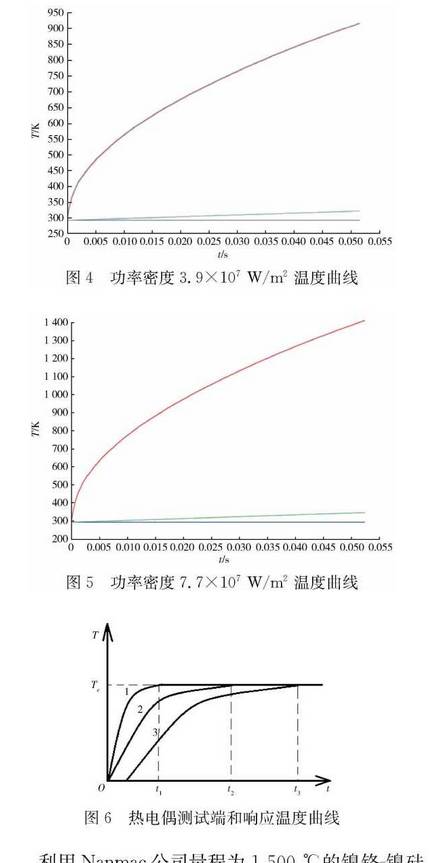
在模型中建立3個溫度探針用于測量熱電偶加熱時傳感器被加熱面,傳感器前方50mm處和屏蔽箱上的溫度,圖4和圖5中從上往下依次分別為激光功率密度為3.9X10
7W/m
2和7.7X10
7W/m2的激光對直徑為3mm的熱電偶加熱時模型3個溫度探針所測的曲線。激光功率密度為7.7X10
7W/m
2時,熱電偶測試端可以在50ms內被加熱到1200℃,不難發現激光功率密度高的激勵源能夠更快地建立階躍溫度場,且激光輸出功率越高,單位時間內被加熱熱電偶溫升曲線越陡峭
如圖6所示,曲線1為激光加熱熱電偶表面的溫度變化曲線,曲線2和曲線3分別為不同響應速度的熱電偶輸出溫度曲線。當熱電偶的響應速率快于溫度場的變化速率時,熱電偶輸出曲線會和曲線1重合,測得曲線不能反映熱偶的動態特性,無法正確測得其時間常數。不難發現只有使熱電偶表面溫度階躍快于熱電偶的響應速度,才能確保熱電偶時間常數測量結果的可靠性,即熱電偶測試端單位時間內的溫升越陡峭,其溫度場越接近理想溫度階躍場。因此可以將半導體激光器的輸出功率調制最大,輸出占空比為100%,可以通過控制激光出光時間來得到不同大小的溫度階躍場。
利用Nanmac公司量程為1500℃的鎳鉻鎳硅偶結外露的
K型熱電偶對激光器最大輸出功率進行測試,熱電偶在50ms內輸出電壓階躍為1.46mV,熱電偶放大電路的放大倍數為50倍,通過查找其對應分度表發現,熱電偶表面溫度場階躍為1267℃。因此本系統具備對量程小于1300℃且響應時間大于50ms的熱電偶進行時間常數測試的條件
4某K型熱電偶時間常數測試
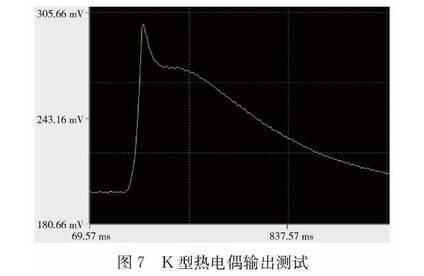
接點外露型熱電偶測溫端直徑一般為1mm左右,其熱慣性很小,且響應速度為ms甚至μs級。這就要求熱電偶表面有很快的溫度階躍,同時熱電偶熱慣性過小和激光器較大的輸出功率使得單--不變的激光器輸出功率不能使熱電偶在加熱過程中實現溫度上的動態平橫。如圖7所示,在標況下對接點外露的某K型傳感器加熱,設置激光輸出功率為300W,出光時間為500ms。熱電偶響應速度達到ms級別,能夠快速反映溫度場變化,雖然有溫度階躍,但是激光加熱時,其輸出溫度曲線并沒有達到動態平衡狀態,不滿足時間常數測量條件。
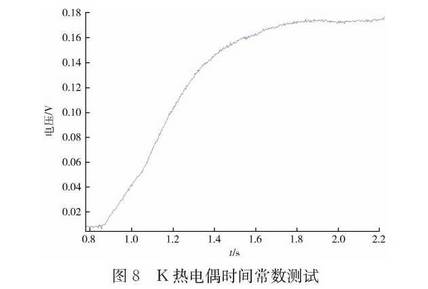
因此對于接點外露型熱電偶進行時間常數測試時需要加入反饋控制系統,當熱電偶輸出達到某一階躍時,通過控制系統降低激光器的輸出功率,使熱電偶擴散能夠等于其吸收能量,從而實現溫度上的動態平衡狀態,熱電偶指示溫度與其初始溫度之差的63.2%為其時間常數。采用反饋控制PID算法,設置K,為2.3,K;為0.2,Ka為2.4,測試結果如圖8所示,熱電偶在溫度達到700℃后輸出基本動態平衡。通過計算分析得出該K型熱電偶的時間常數為τ=446.9ms,不確定度U=0.62ms。
5結論
本文介紹了1種利用高功率980nm半導體激光器作為階躍溫度的激勵裝置獲取熱電偶時間常數的方法。利用COMSOL有限元仿真軟件建立熱電偶加熱過程模型,發現激光輸出功率為500W時,被測熱電偶表面能夠在50ms產生1200℃的階躍溫度場,且激光器輸出功率密度越高,熱電偶表面溫升曲線越陡峭,越接近理想階躍溫度場。通過實驗驗證本系統能夠為量程小于1300C、時間常數大約50ms的熱電偶提供可靠的時間常數測試條件。