熱電偶級聯(lián)系統(tǒng)動態(tài)性能評估方法
發(fā)布時間:2021-07-29
瀏覽次數(shù):
摘要:為了在缺乏激勵信號先驗知識的情況下實現(xiàn)
熱電偶動態(tài)性能評估,提出一種由三只不同偶絲直徑熱電偶組成的級聯(lián)式溫度測試系統(tǒng)的時間常數(shù)評估方法。該方法基于總體最小二乘Tikhonov正則化算法對熱電偶級聯(lián)系統(tǒng)數(shù)學(xué)模型進行辨識及時間常數(shù)解算。對于熱電偶偶絲直徑較為接近的測試系統(tǒng),基于奇異值分解進行正則化方法優(yōu)化,可以避免熱電偶信息矩陣共線性造成的時間常數(shù)病態(tài)估計,有效拓展了該方法的適用性。通過數(shù)值仿真進行了理論驗證,并在一種氣體溫度動態(tài)校準(zhǔn)裝置中進行了實驗驗證,結(jié)果表明奇異值分解正則化時間常數(shù)估計方法相比總體最小二乘Tikhonov正則化算法和普通最小二乘算法,辨識精度分別至少提高了75%和3.5倍,證明了該方法的有效性。
0引言
熱電偶成本低廉、現(xiàn)場適應(yīng)性好,在工程領(lǐng)域應(yīng)用廣泛。但熱電偶在動態(tài)溫度測量時存在明顯的滯后特性。為了保證動態(tài)溫度測量的可靠性和正確性,需要對熱電偶滯后特性進行評估,一般以時間常數(shù)進行量化表征。一般地,時間常數(shù)估計基于專用的動態(tài)校準(zhǔn)裝置實現(xiàn)。溫度動態(tài)校準(zhǔn)裝置要求可以產(chǎn)生快速階躍變化的激勵信號,保證激勵信號可溯源,并且保證校準(zhǔn)介質(zhì)條件與熱電偶測試介質(zhì)條件一致[5,6]。研制可靠的熱電偶動態(tài)校準(zhǔn)裝置往往具有較大難度,而且難以保證熱電偶校準(zhǔn)和測試介質(zhì)條件的一致性。為了解決上述問題,發(fā)展出一系列的時間常數(shù)現(xiàn)場原位估計方法。其中較為典型的是基于測量同一物理點的兩支不同偶絲直徑熱電偶的動態(tài)溫度響應(yīng)信號,解算各熱電偶時間常數(shù)的評估方法。該方法于1936年首次由Pfriem提出。Tagawaet.al.通過計算兩個激勵溫度信號相關(guān)函數(shù)的最大值來計算時間常數(shù)。另外,Hung等,提出β型廣義最小二乘估計方法,應(yīng)用離散時間系統(tǒng)辨識方法對熱電偶進行建模,然后通過模型參數(shù)解算時間常數(shù)。但是,當(dāng)兩只熱電偶絲的直徑較為接近,會造成時域響應(yīng)接近共線性,由奇異矩陣求解得到的時間常數(shù)通常出現(xiàn)病態(tài)解,同時β型廣義最小二乘估計方差隨著噪聲水平的增長而迅速增長,導(dǎo)致返回不合理的時間常數(shù)估計值。
本文針對熱電偶級聯(lián)系統(tǒng)信息矩陣共線性病態(tài)問題,提出一種差值級聯(lián)動態(tài)
性能參數(shù)評估方法,基于總體最小二乘Tikhonov正則化算法評估測試系統(tǒng)模型參數(shù),分析測試噪聲對估計結(jié)果的影響,同時基于奇異值分解的Tikhonov正則化優(yōu)化方法,擴展了級聯(lián)系統(tǒng)時間常數(shù)評估方法的適用性。對熱電偶時間常數(shù)估計方法做出了有益探索。
1動態(tài)性能評估方法原理
1.1熱電偶級聯(lián)系統(tǒng)組成
級聯(lián)系統(tǒng)由三支不同絲徑熱電偶組成,各熱電偶盡可能靠近地安裝于同一位置測試點,獨立輸出。若忽略安裝位置偏差,可以認(rèn)為在同一測試點各熱電偶受環(huán)境或其它因素影響是一致的,通過熱電偶響應(yīng)之間差值計算,可以降低噪聲對模型參數(shù)辨識精度的影響。熱電偶輸出信號的差值作為級聯(lián)系統(tǒng)輸出信號。熱電偶一般可認(rèn)為是一階動態(tài)測試系統(tǒng)[18],級聯(lián)系統(tǒng)原理框圖如圖1所示。將三支熱電偶溫度響應(yīng)值互求差值,并建立數(shù)學(xué)模型,通過對模型參數(shù)的辨識估計,可以得到各熱電偶時間常數(shù)估計值。
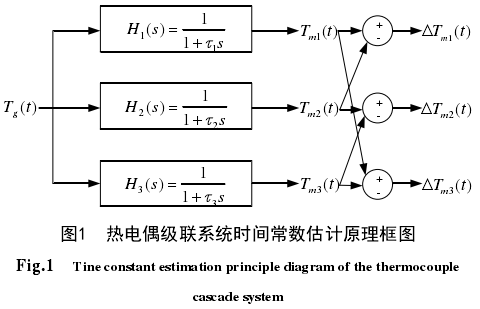
將圖1中熱電偶響應(yīng)信號和差值信號進行離散化:
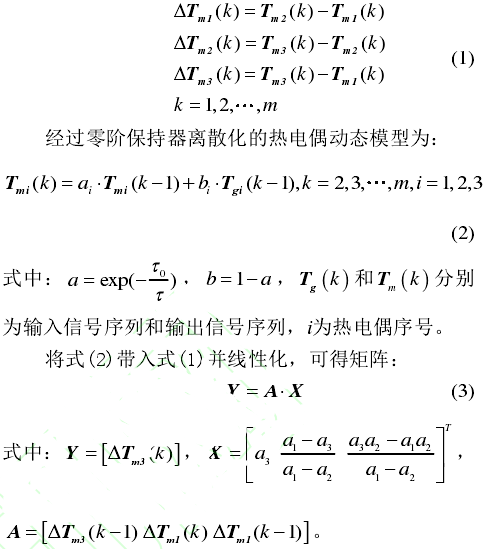
將式(3)中矩陣A稱為熱電偶級聯(lián)系統(tǒng)的信息矩陣,向量Y稱為觀測值向量,向量X稱為待辨識參數(shù)向量。信息矩陣A列向量為各熱電偶響應(yīng)信號的差值序列,可認(rèn)為其中不含偏置誤差,偏置誤差僅存在于觀測值向量中,那么基于總體最小二乘法得到的參數(shù)估計值可以認(rèn)為是無偏的。總體最小二乘解為:

式中:σn+1s+為增廣矩陣[AY]的第n+1個奇異值,I為單位陣。
總體最小二乘求解過程是一個降正則化的過程,在求解中可能會出現(xiàn)病態(tài)或不穩(wěn)定的結(jié)果。基于數(shù)理統(tǒng)計理論的觀點,總體最小二乘在求解中可以通過減去1個系數(shù)誤差的近似協(xié)方差陣σ(n+I)來達到減小矩陣ATA中偏差的效果,進而得到相對穩(wěn)定的解[19]。在不等式約束條件下,建立Lagrange多項式:

式中:λ為Lagrange因子,δ為待辨識參數(shù)估計誤差,L為定義范數(shù)的矩陣。
通過式(5)求解參數(shù)X。當(dāng)δ足夠小時,X滿足如下目標(biāo)函數(shù)[20]:
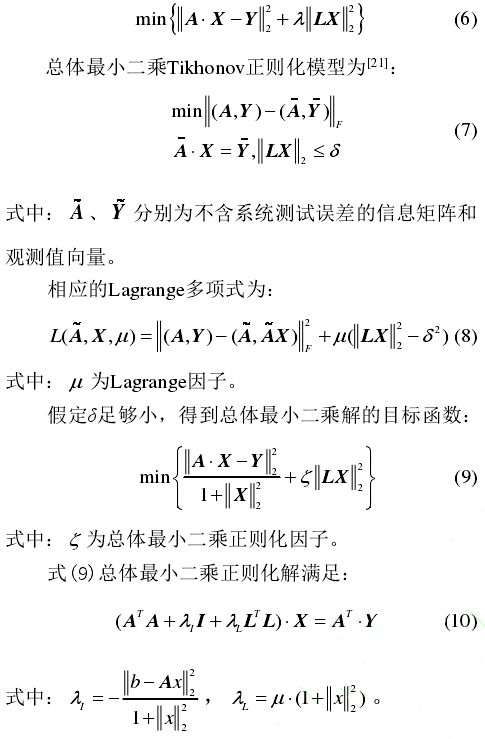
基于式(10)可以得到辨識參數(shù)估計值,進一步解算可得熱電偶時間常數(shù)估計值。
2測量噪聲對辨識精度影響的驗證分析
由于測量噪聲對于系統(tǒng)辨識是否能夠返回?zé)o偏估計具有重要影響,因此,需要對上述總體最小二乘正則化模型分析方法進行理論驗證。分析正弦激勵信號和階躍激勵信號分別對于恒定時間常數(shù)和變化時間常數(shù)級聯(lián)系統(tǒng)的影響。其中,正弦信號波動頻率設(shè)為0.1Hz。級聯(lián)系統(tǒng)時間常數(shù)分別設(shè)為τ1=0.0238s、τ2=0.38s、τ3=0.9578s。為了說明測量噪聲水平對于算法結(jié)果的影響,定義信號噪聲水平K:

式中:QRMSE表示噪聲方差值,PRMSE表示信號均方差。對于給定的噪聲水平,算法性能通過時間常數(shù)相對誤差進行評價:

2.1測量噪聲對恒定時間常數(shù)級聯(lián)系統(tǒng)的影響
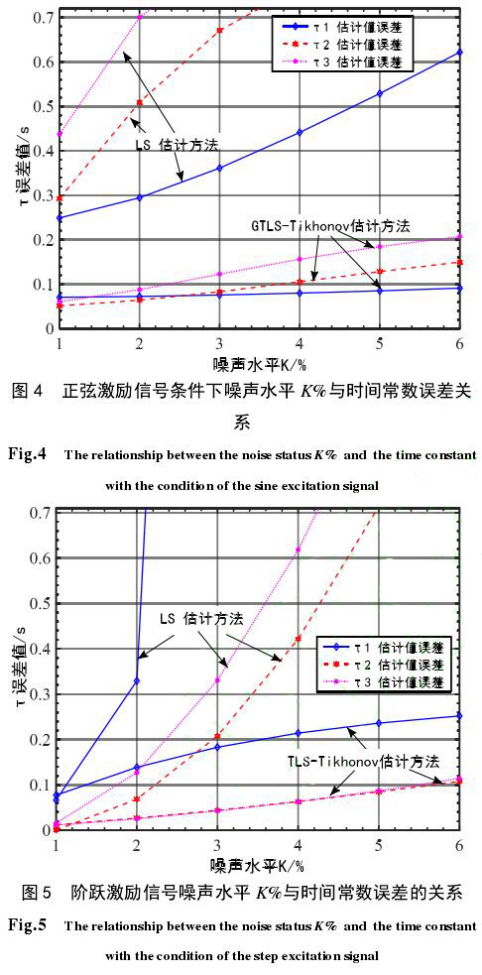
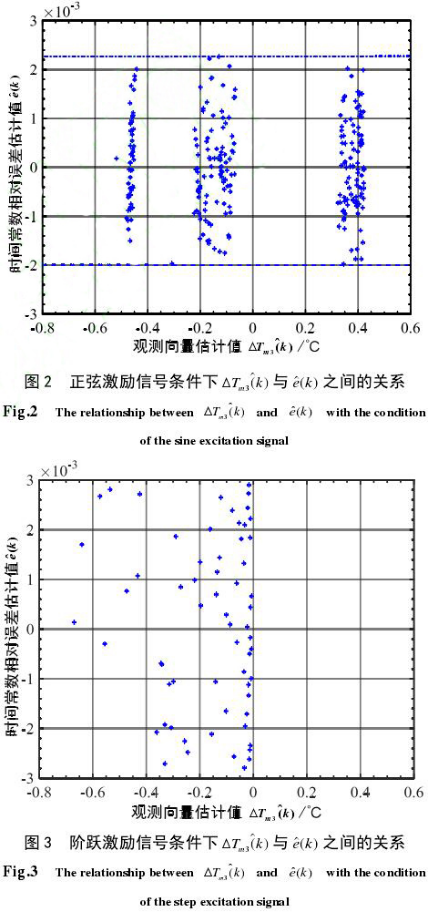
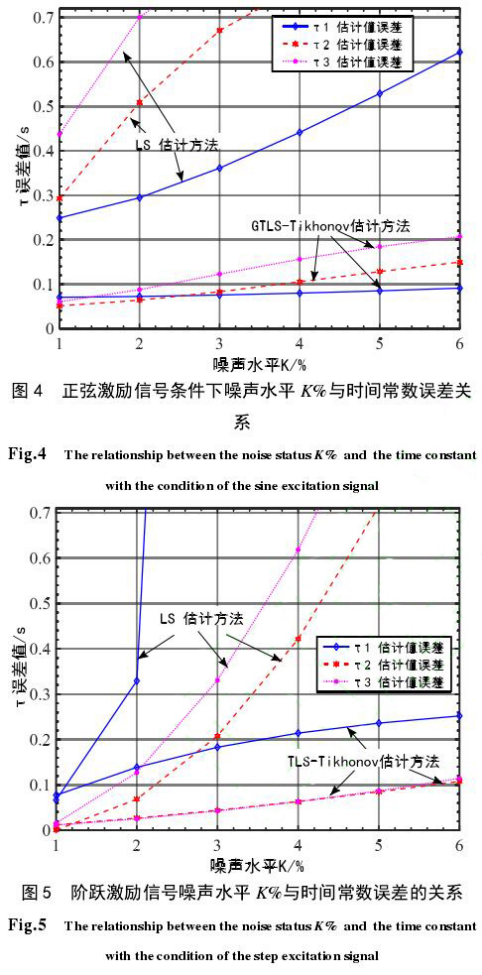
在級聯(lián)系統(tǒng)響應(yīng)信號加入零均值、等方差的高斯序列噪聲,分析噪聲水平對于各算法的性能影響。熱電偶傳遞函數(shù)相當(dāng)于單位增益的低通濾波器,同時加入的噪聲是不相關(guān)的。仿真時間持續(xù)均為5s,采樣頻率為50Hz。在正弦激勵信號和理想階躍激勵信號情況下,分別運用TLS-Tikhonov算法對時間常數(shù)進行估計,時間常數(shù)殘差點分布分別如圖2和圖3所示。
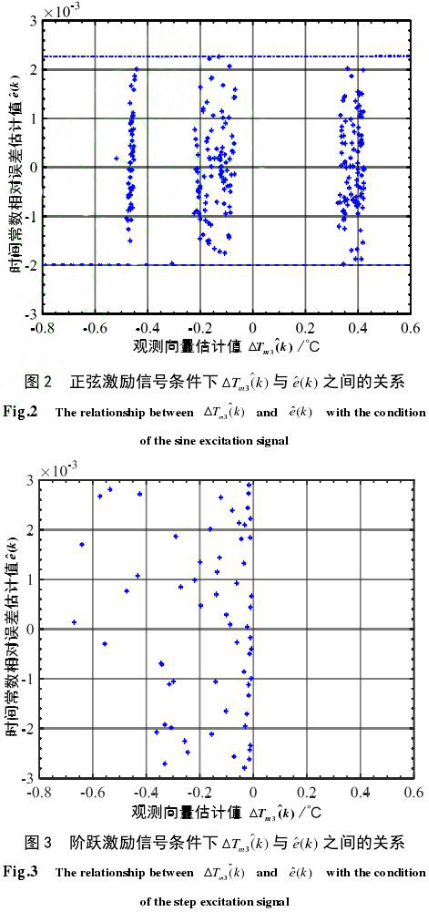
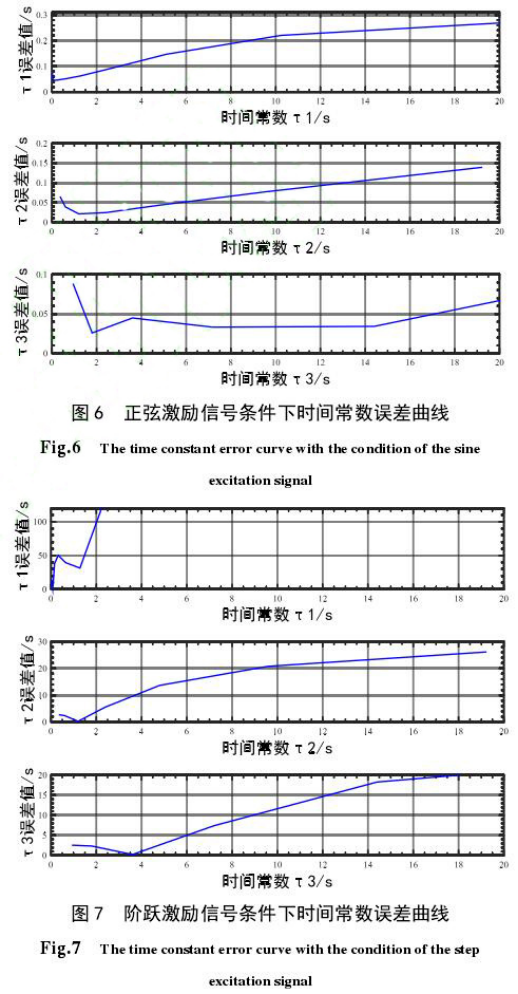
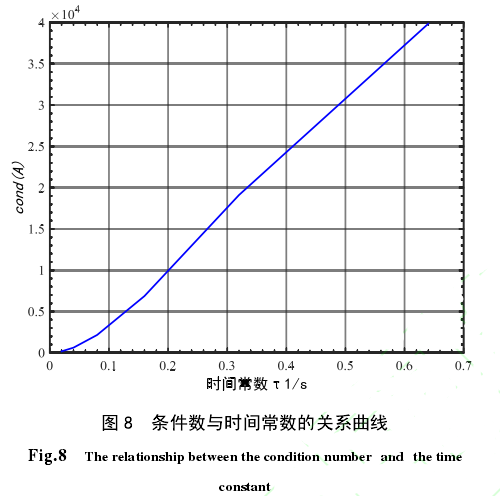
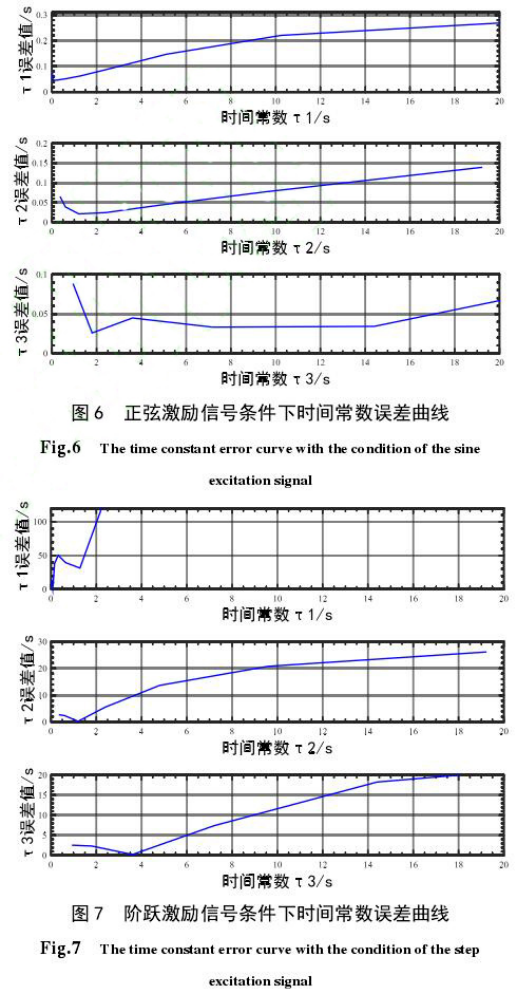
由圖2,圖3可以看出:在正弦和階躍激勵信號條件下,時間常數(shù)的殘差均在±3×10-3范圍內(nèi),具有較高的辨識精度。為了進一步對TLS-Tikhonov算法性能進行評估,將普通最小二乘法(leastsquares,LS)估計與TLS-Tikhonov算法估計隨噪聲水平的變化情況分別在正弦與階躍激勵信號條件下進行比較,如圖4和圖5所示。
由圖4和圖5可以看出,在K=0時,TLS-Tikhonov算法與LS算法差異相對較小,隨噪聲水平的增加,TLS-Tikhonov算法時間常數(shù)估計精度明顯優(yōu)于LS算法。這是由于LS算法的信息矩陣A存在偏置誤差,從而造成估計值有偏,且與噪聲呈正相關(guān)關(guān)系。因此,對于有測量噪聲影響的恒定時間常數(shù)級聯(lián)系統(tǒng),TLS-Tikhonov算法具有較高的辨識精度。
2.2測量噪聲對變化時間常數(shù)級聯(lián)系統(tǒng)的影響
假設(shè)級聯(lián)系統(tǒng)熱電偶時間常數(shù)變化規(guī)律如下:

式中:τ1(0)=0.0238s,τ2t(0)=0.38s,3t(0)=0.9578s。
正弦與階躍激勵信號情況下,K=2測量噪聲水平對時間常數(shù)誤差影響曲線分別如圖6,圖7所示:
如圖6和圖7所示,對于正弦激勵信號情況:在各誤差曲線初始階段,時間常數(shù)誤差值隨著時間常數(shù)增大有減小趨勢,且變化不同步。其原因在于,隨著時間常數(shù)逐漸增大,各熱電偶溫度響應(yīng)序列相關(guān)系數(shù)逐漸達到最小值,但是由于其變化過程不同步,導(dǎo)致各熱電偶時間常數(shù)辨識結(jié)果達到最小值過程不同步;對于階躍激勵信號情況:基于TLS-Tikhonov算法,時間常數(shù)τ1估計結(jié)果很快發(fā)散,且時間常數(shù)τ2和τ3辨識精度也較差。這是由于階躍激勵信號信息矩陣A存在突變量值,產(chǎn)生了較大的矩陣條件數(shù)。按照陳希孺等[22]給出的檢驗標(biāo)準(zhǔn),cond(A)<100,認(rèn)為無病態(tài);100<cond(A)<1000,病態(tài)中等程度或較強;cond(A)>1000,有嚴(yán)重病態(tài)性。時間常數(shù)τ1條件數(shù)變化趨勢如圖8所示:
當(dāng)τ1>0.1s,法矩陣即存在嚴(yán)重病態(tài)性,利用最小二乘類回歸方法必然估計值不收斂,因此圖7中時間常數(shù)τ1相較于τ2,τ3發(fā)散較快。因此,對于有測量噪聲影響的變化時間常數(shù)級聯(lián)系統(tǒng),TLS-Tikhonov算法的辨識能力并不理想,需要進行算法的改進。
2.3基于奇異值分解的Tikhonov正則化優(yōu)化方法
當(dāng)級聯(lián)系統(tǒng)中各熱電偶偶絲直徑趨于一致時,級聯(lián)系統(tǒng)信息矩陣A各列向量之間會出現(xiàn)嚴(yán)重互相關(guān)情況,從而導(dǎo)致熱電偶時間常數(shù)估計病態(tài)嚴(yán)重。本文利用Tikhonov正則化方法,增加全部或部分參數(shù)加權(quán)平方和極小的條件,克服不適定性[23],從而使解唯一且穩(wěn)定。即用相鄰的適定問題的解去逼近原問題的解,并利用奇異值分解(singularvaluedecomposition,SVD)對于求廣義逆的便利性,對病態(tài)矩陣參數(shù)進行估計。構(gòu)造準(zhǔn)則函數(shù):
用是將不適定問題轉(zhuǎn)化為適定問題;a是正則化參數(shù),起著平衡aM右邊兩項的作用。隨著穩(wěn)定泛函W(X)的不同,有不同的準(zhǔn)則函數(shù);同時正則化參數(shù)a選擇也十分重要,穩(wěn)定泛函W(X)一般選為:
對于熱電偶級聯(lián)系統(tǒng)信息矩陣A各列向量中,不存在復(fù)共線性的,用矩陣A1表示,其余列向量用矩陣A2表示,即:
正則化參數(shù)使用L曲線法計算:以‖AX−Y‖p為橫坐標(biāo),以‖X‖H為縱坐標(biāo)畫圖,得到一條擬合曲線,曲線上曲率最大的那個點對應(yīng)的值作為所求參數(shù)估計值[24]。令¢=log‖Y−AX(ɑ)‖,θ=log‖X(ɑ),則曲線的曲率為參數(shù)ɑ的函數(shù),有:

基于理想階躍激勵信號,在追求參數(shù)解的模極小和殘差的模極小的過程中,強調(diào)的是‖AX−L‖P和‖HX‖H之間的平衡,而這個平衡點由ɑ來決定。
3參數(shù)辨識算法的驗證分析
3.1仿真驗證分析
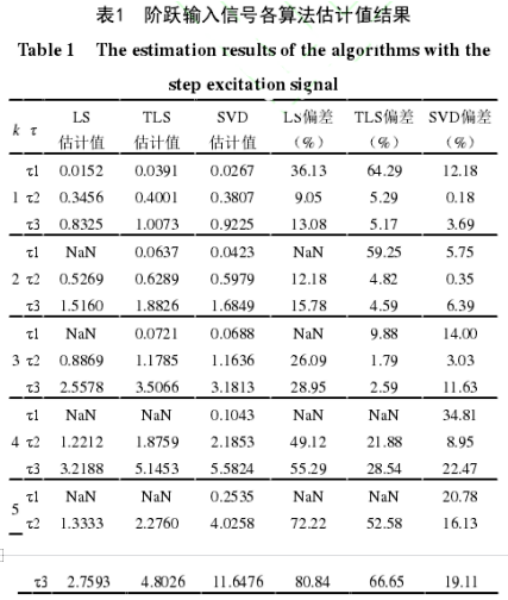
為評估階躍激勵信號條件下,測量噪聲對變化時間常數(shù)級聯(lián)系統(tǒng)的影響,將LS、TLS-Tikhonov、Tikhonov-SVD算法對式(13)所述時間常數(shù)估計值偏差列入表1。
如表1所示結(jié)果,利用Tikhonov-SVD方法時間常數(shù)估計值與真值偏差相較于LS算法與TLS-Tikhonov算法有明顯的改善。另一個角度說明,通過Tikhonov-SVD方法,可以拓寬級聯(lián)系統(tǒng)關(guān)于熱電偶絲物理條件一致性的使用條件限制,但是隨著噪聲水平的提高,Tikhonov-SVD算法辨識估計結(jié)果,以τ2估計結(jié)果為例,偏差呈上升趨勢。
3.2實驗驗證分析
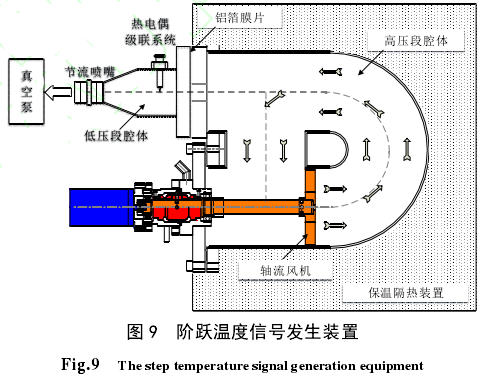
算法實驗驗證是基于激勵信號先驗知識可獲取的動態(tài)校準(zhǔn)裝置上實現(xiàn)的,依據(jù)動態(tài)校準(zhǔn)裝置激勵信號溯源評估結(jié)果,可以得到時間常數(shù)的可靠評估結(jié)果,并以此作為算法性能的評價依據(jù)。驗證試驗采用的動態(tài)校準(zhǔn)裝置如圖9所示,裝置組成部分包括:高壓段腔體、低壓段腔體、真空泵、軸流風(fēng)機、電加熱器、鋁箔膜片、保溫隔熱裝置[25]。
熱電偶級聯(lián)系統(tǒng)由三支
K型熱電偶組成,熱電偶偶絲直徑分別為d1=0.02mm、d2=0.3mm、d3=0.8mm。為了保證級聯(lián)系統(tǒng)熱電偶對同一物理點進行測試,將三支熱電偶封裝于同一殼體內(nèi),封裝結(jié)構(gòu)如圖10所示。
熱電偶級聯(lián)系統(tǒng)安裝于低壓段腔體,為了使腔體內(nèi)流體速度恒定在腔體出口處安裝節(jié)流噴嘴。高壓段腔體為一密閉回型腔體,在腔體內(nèi)部安裝了電加熱器和內(nèi)置軸流風(fēng)機,通過軸流風(fēng)機和電加熱器的綜合作用,實現(xiàn)腔體內(nèi)氣體循環(huán)加熱,從而在腔體內(nèi)產(chǎn)生溫度均勻的高溫氣體。為了保證加熱效率和防護安全,在高壓段外裹覆有保溫絕熱層。
首先對高壓段腔體加壓至額定值,運行軸流風(fēng)機為低壓段腔體內(nèi)氣體循環(huán)流動提供動力。通過在高壓段腔體內(nèi)均勻分布的電加熱器對腔內(nèi)氣體加熱,當(dāng)溫度、壓力達到額定值,開啟真空泵,使得低壓段腔體出口處的鋁箔膜片自然破裂,產(chǎn)生階躍溫度激勵信號,作用于熱電偶級聯(lián)系統(tǒng)上,為了使高溫氣體持續(xù)對熱電偶產(chǎn)生溫度激勵,在開啟真空泵的同時打開空氣壓縮機,保持低壓段腔體內(nèi)高壓,記錄傳感器響應(yīng)情況,響應(yīng)結(jié)果如圖11所示,整個實驗持續(xù)時間42s,采樣頻率為100Hz。

基于動態(tài)校準(zhǔn)裝置激勵信號和級聯(lián)系統(tǒng)響應(yīng)信號,通過頻域建模法可以對時間常數(shù)進行可靠估計,并以此作為時間常數(shù)的評價基準(zhǔn),LS、TLS-Tikhonov、Tikhonov-SVD算法對時間常數(shù)估計結(jié)果表2所示。
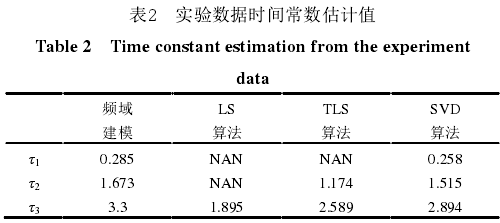
如表2所示,LS算法由于受到測量噪聲影響較為嚴(yán)重,τ1、τ2返回值為非合理值;TLS-Tikhonov算法性能與時間常數(shù)的差異性條件與熱電偶響應(yīng)誤差等有密切關(guān)系,而實驗中熱電偶絲直徑d1與d2較為接近,所得估計結(jié)果由于信息矩陣共線性病態(tài)嚴(yán)重,時間常數(shù)估計值τ1返回值為非合理值;Tikhonov-SVD算法時間常數(shù)估計結(jié)果與頻域建模評估結(jié)果吻合程度較高。以τ3返回值為考核對象,Tikhonov-SVD算法時間常數(shù)估計相對誤差相比TLS-Tikhonov算法和LS算法,辨識精度分別提高了75%和3.5倍。
因此,通過Tikhonov-SVD算法對時間常數(shù)進行估計,可以得到較為理想的估計結(jié)果。
4結(jié)論
本文提出了基于TLS-Tikhonov算法的熱電偶時間常數(shù)估計方法。通過建立級聯(lián)系統(tǒng)數(shù)學(xué)模型,由模型參數(shù)辨識方法實現(xiàn)時間常數(shù)估計。文中運用TLS-Tikhonov算法來處理模型信息矩陣受到噪聲污染的情況,同時研究噪聲水平分別對恒定時間常數(shù)及變化時間常數(shù)估計的精度影響。由于級聯(lián)系統(tǒng)信息矩陣共線性的問題,時間常數(shù)估計出現(xiàn)嚴(yán)重病態(tài)結(jié)果,同時由于測量噪聲的存在,避免產(chǎn)生時間常數(shù)相似性造成病態(tài)估計問題的條件將更為苛刻。基于Tikhonov-SVD方法可以對上述問題進行有效改善。通過數(shù)值仿真和動態(tài)校準(zhǔn)實驗,分別對LS方法、TLS-Tikhonov方法和Tikhonov-SVD方法的時間常數(shù)評估結(jié)果進行評價,結(jié)果表明,TLS-Tikhonov方法對于響應(yīng)信號受到噪聲污染的情況比LS方法具有更高的辨識精度,Tikhonov-SVD方法對于熱電偶物理特性相近造成的信息矩陣共線性情況比TLS-Tikhonov方法具有更高的辨識精度。因此,在實踐中熱電偶時間常數(shù)評估Tikhonov-SVD方法具有更好的適用性。