
摘要:采用工控機、DataAcquisition34970A數據采集儀與TP17650M干式爐設計了一套熱電偶動態響應試驗系統。重點試驗研究了E型熱電偶在不同工作溫度下、不同偶絲直徑與不同置入深度對該溫度傳感器動態特性的影響;在此基礎上,采用MATLAB軟件對試驗數據進行了數學建模與研究,得出了E型熱電偶動態響應數學模型,指出在實際測溫時應該從工作溫度、安裝深度、熱電偶直徑等多方面進行選擇,以確保測溫的正確性和可靠性,間接地為該類型熱電偶在設置“單點”保護閾值方面提供了必要的理論依據和實踐指導,同時也為其它標準熱電偶的動態響應特性試驗和設置“單點”保護閾值方面提供了一定的借鑒作用。
0引言
熱電偶作為火電廠中常用的測溫裝置,測量的正確性與可靠性對于熱工過程的自動控制顯得重要,尤其是在DCS控制回路以及輔控系統里,溫度“單點’保護閾值設定的合理與否,會引起控制系統保護的“誤動”與“拒動”。根據調研發現,目前火電廠中溫度“單點”保護閾值的設置值會從十幾度到幾十度甚至.上百度均有,沒有統一的參考與規范,同時這些隨意的設定值會導致溫度測量裝置的燒損、回路的異常等現象時有發生,進而造成溫度信號的失真”,引起機組的非計劃減出力或停運,給電力系統帶來巨大損失。
為此,不少業內專家學者針對熱電偶測溫特性進行過相關動態試驗方法的設計與測試工作。上述研究與分析旨在解決熱電偶測溫時遇到的各種問題的困擾。本文基于現狀設計了一套溫度傳感器動態響應測試方案,通過該試驗平臺測試了在不同工作環境溫度下、不同偶絲直徑、不同置入深度下E型熱電偶的動態響應特性,并且建立了相應的數學模型,為該類型熱電偶在設置“單點”保護閾值方面提供了必要的理論依據和實踐指導作用。
試驗方案
1.1硬件設備
本次試驗采用DataAcquisition34970A數據采集儀、TP17650M校驗儀為標準熱源,通過工控機將該硬件進行連接,對E型熱電偶進行了試驗研究與分析。
1.2試驗系統
如圖1所示,設計該試驗系統。
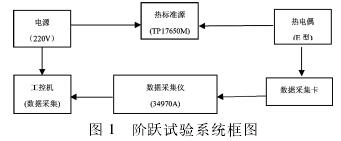
如圖1所示,該動態響應試驗系統包括熱標準源、被測熱電偶(E型熱電偶)、數據采集卡、安捷倫數據采集儀、電源和工控機。工控機通過RS-232串口與數據采集儀相連,通過工控機.上對應的數據采集軟件,將試驗讀取的數據記錄在工控機中。
1.3試驗步驟
(1)校驗溫度:將E型熱電偶接入測試系統中,通過設定標準熱源溫度為100C、300C、500C與熱電偶實測溫度進行比較校驗,以保證熱電偶測溫的正確性;
(2)設定工作溫度:啟動熱源(干式校驗爐),將熱源的溫度設定為試驗所需的溫度值,將熱電偶置入熱源之中,監測數據采集儀上顯示的溫度值,當熱電偶到達設定值之后,進行溫度突升、突降的“動態”試驗;
(3)數據采集:將工控機采集時間設置為1秒,在工控機頁面點擊“開始采集”按鈕,開始進行溫度突升、突降的“動態階躍”試驗,注意本試驗過程中,置入深度對熱電偶測溫的影響很大,因此在進行升溫、降溫實驗過程中,要始終控制保持熱電偶置入深度不變;
(4)“階躍”溫度突升試驗:在熱電偶到達設定值之后,將熱電偶取出使其冷卻到實驗溫度之后迅速置入爐中(模擬階躍信號的輸入),在此過程中密切監視數據采集儀.上溫度的變化。在熱電偶回歸到設定值并穩定之后,點擊工控機頁面“停止采集”按鈕,保存實驗數據;
(5)“階躍”溫度突降試驗:在熱電偶到達設定值之后,改變熱源的設定值到實驗值,開始降溫。在熱電偶達到實驗值并穩定之后,點擊工控機頁面“停止采集按鈕,保存實驗數據;
(6)改變熱標準源的溫度設定值,在不同的溫度設定值下進行溫度“階躍”試驗,并且對每一-個溫度的“階躍”,改變熱電偶置入干式爐的深度,重復步驟2,對熱電偶進行溫度突升、突降的“階躍”試驗,以便得到E型熱電偶的階躍響應曲線以及數學模型。
2階躍響應特性研究
2.1“階躍”試驗模型
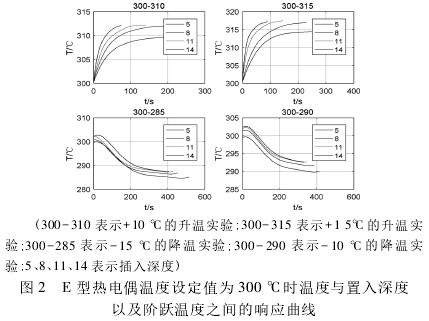
根據試驗步驟,以E型熱電偶為例,正常工作溫度分別設置在200C、300C、400C、500C以及550C,階躍溫度變化在+10C和+15C,置入深度分別在5cm、8cm、11cm以及14cm時;首先將試驗采集到階躍溫度數據通過數據采集卡讀取到工控機中,一共獲取幾萬組數據,再將該數據讀取到MATLAB中,通過MATLAB對得到的實驗數據進行提取、分離出時間量與溫度量,通過擬合公式以獲得響應時間與溫度變化之間的關系。該過程擬合了80個公式,20張動態響應曲線圖,現以工作溫度為300C時動態試驗進行說明,以表1所示。同時,根據表1繪制了其對應的階躍響應曲線,為了方便比較,這里將同一溫度,同一階躍溫度的曲線放在一起,以響應時間為橫坐標,以熱電偶測量溫度為縱坐標繪制階躍響應曲線,如圖2所示。

2.2“動態”試驗分析
從E型熱電偶溫度設定值為300C的動態響應曲線來看,可以獲知以下幾點結論:
(1)“動態”升溫實驗中,熱電偶升溫趨勢一致;隨著插入深度的增加,熱電偶升溫的響應時間減少;插入深度為14cm時響應時間最短;階躍溫度為15C時比階躍溫度為10C時的響應時間要短;
(2)降溫實驗中,隨著置入深度的增加,熱電偶的響應時間基本保持不變;階躍溫度為15C時比階躍溫度為10C時的響應時間要短;
(3)置入深度為5cm時,測量誤差較大;
(4)測溫曲線后期不穩定,會出現曲線波動情況。
由此可以看出,當使用該熱電偶測溫時,隨著安裝地點與被測溫度點的不同,最大溫升率閾值的設置也要根據具體情況來設置,否則如果設定不當,則會引起控制系統誤動作,進而引起機組的非計劃停機。
3數學建模
3.1溫度、響應時間與置入深度間的關系
為了建立響應時間與置入深度以及工作溫度之間.的關系,需要對實驗得到的數據進行三維擬合,讀出熱電偶在不同的階躍溫度下、不同深度以及不同溫度設定值的響應時間的變化趨勢及規律。由表2所示。
表2E型熱電偶響應時間數據表
|
溫度/℃ |
深度/cm |
階躍溫度+10℃響應時間/s |
階躍溫度+15℃響應時間/s |
階躍溫度-15℃響應時間/s |
階躍溫度-10℃響應時間/s |
|
200 |
5 |
260 |
323 |
443 |
425 |
|
200 |
8 |
149 |
314 |
482 |
463 |
|
200 |
11 |
217 |
296 |
472 |
420 |
|
200 |
14 |
183 |
53 |
469 |
362 |
|
300 |
5 |
215 |
302 |
469 |
414 |
|
300 |
8 |
223 |
231 |
429 |
385 |
|
300 |
11 |
115 |
146 |
388 |
344 |
|
300 |
14 |
75 |
91 |
402 |
333 |
|
400 |
5 |
196 |
257 |
416 |
444 |
|
400 |
8 |
240 |
253 |
398 |
398 |
|
400 |
11 |
215 |
244 |
399 |
362 |
|
400 |
14 |
278 |
219 |
358 |
300 |
|
500 |
5 |
219 |
208 |
414 |
357 |
|
500 |
8 |
147 |
204 |
416 |
367 |
|
500 |
11 |
150 |
106 |
278 |
287 |
|
500 |
14 |
154 |
154 |
292 |
320 |
|
550 |
5 |
155 |
337 |
320 |
281 |
|
550 |
8 |
267 |
194 |
335 |
364 |
|
550 |
11 |
59 |
291 |
458 |
285 |
|
550 |
14 |
280 |
291 |
276 |
257 |
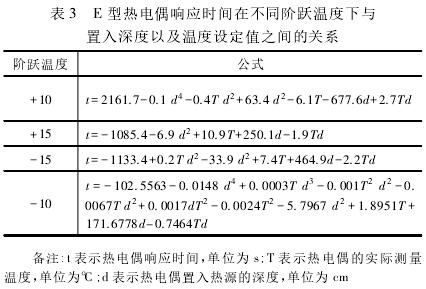
根據上表,可以得出表3所示的公式。
3.2分析與討論
根據公式及擬合圖像分析,可以得出下面四點結論:
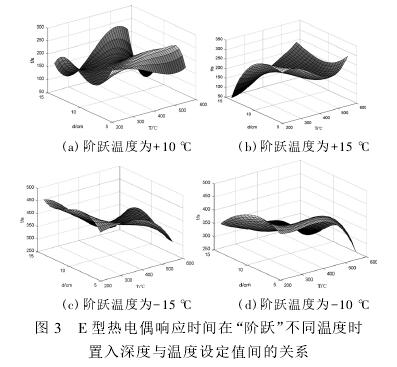
(1)階躍溫度為+10C:
①在溫度為200C、300C時,隨著深度的增加,響應時間先減小后增加;在溫度段為400C、500C、550C時,隨著插入深度的增加,響應時間先增加后減小最后又增加。
②在置入深度為5cm時,隨著溫度設定值增加,響應時間減小;在置入深度為8cm時,隨著溫度設定值增加,響應時間先增加后減小;置入深度為11em時,隨著溫度設定值增加,響應時間減小;插入深度為14cm時,隨著溫度設定值增加,響應時間先減小后增加。
(2)階躍溫度為+15C:
①在溫度段為200C、300C、400C時,隨著深度的增加,響應時間減小;在溫度段為500C、550C時,隨著插入深度的增加,響應時間先減小后增加。
②在插入深度為5cm、8cm、11cm時,隨著溫度設定值增加,響應時間先減小后增加;在插入深度為14cm時,隨著溫度設定值增加,響應時間增加。.
(3)階躍溫度為-15C:
①在溫度段為200C、300C時,隨著深度的增加,響應時間基本保持不變;在溫度段為400C、500C時,隨著置入深度的增加,響應時間減小;在溫度段為550C時,隨著置入深度的增加,響應時間先增加后減小;
②在插入深度為5cm、8cm時,隨著溫度設定值增加,響應時間減小;在插入深度為11cm時,隨著溫度設定值增加,響應時間先減小后增加;在插入深度為14cm時,隨著溫度設定值增加,響應時間減小。
(4)階躍溫度為-10C:
①在溫度段為200C、300C時,隨著深度的增加,響應時間先增加后減小;在溫度段為400C、500C、550C時,隨著插入深度的增加,響應時間先增加后減小再增加;
②在置入深度為5cm時,隨著溫度設定值增加,響應時間先增加后減小;在置入深度為8cm、11cm、14cm時,隨著溫度設定值增加,響應時間減小。
4結論
綜上,設計了溫度傳感器動態響應試驗方案,并以E型熱電偶為研究對象,在該平臺上完成了試驗工作,對不同工作溫度下、置入深度、動態響應時間它們三者之間的關系進行了數學建模的研究與分析,得出以下三點結論:
(1)在相同溫度下,“動態階躍”升溫時,隨著置入深度的增加,E型熱電偶的響應時間先減小后增加,故要求在進行熱電偶安裝時,需要注意置入深度“動態階躍”降溫時,E型熱電偶的響應時間基本保持不變。同時,“動態階躍”溫度值越大(突升或突降變化值),響應時間越短,此時需要充分考慮安裝地點與被測溫度不同時,“閾值”的設定要根據現場情況而定,否則會引起控制系統誤動作;
(2)被測溫度不同時,在“動態階躍”升溫或降溫時,隨著置入深度的不同“階躍”響應時間趨勢也不同;同時置入深度不同時,“階躍”響應時間趨勢也不同,故有響應時間,為設置“閾值”提供理論依據,因而在安裝時,需要根據被測溫度范圍與安裝要求進行“閾值”設定;
(3)數學模型的建立方法,對其它相關熱電偶的動態特性試驗有一定借鑒作用,同時也為其它溫度傳感器.的動態試驗模型作出了相關參考。
Copyright ? 2019 淮安忠和測控儀表有限公司 版權所有 ? 備案號:蘇ICP備12014865號-2
淮安忠和測控儀表有限公司專業成套供應商。品類齊全,價格優惠,歡迎新老客戶來電選購。
地址:江蘇省金湖縣工業園區環城西路269號
電話:0517-86933868
企業郵箱:jszhckyb@163.com