鉑熱敏電阻在液浮陀螺儀溫控系統中應用
發布時間:2021-09-13
瀏覽次數:
摘要:建立了液浮陀螺儀溫控模型,深人分析了其結構組成和工作原理。針對所建立的數學模型對各個結構參數進行了分析研究。對滿足條件的熱敏線圈和
鉑熱敏電阻的溫控系統進行了實驗驗證,實驗結果表明:改進后溫控系統的靜態性能和動態性能得到加強,控制精度較之前未受影響,鉑熱敏電阻器的使用未影響液浮陀螺儀的各項性能指標,為液浮陀螺儀選擇更可靠的溫控元件提供了有力的依據。
0引言
液浮陀螺儀的溫控模型是整個液浮陀螺非常重要的組成部分。陀螺儀是決定慣性系統精度的核心部件,由于其對溫度敏感度大,溫度漂移成為其主要的誤差源之一。溫度變化對陀螺精度的影響主要反映在2個方面:一是陀螺器件材料性能本身對溫度的敏感性;二是周圍溫度場對陀螺工作狀態的影響2],因此,提高陀螺儀的溫控精度和保證其長期可靠的穩定工作是--項非常重要的工作。國內外有關此方面的研究通常可歸納為以下三類解決方法[3]:
1) 通過合理設計改善陀螺結構,使陀螺器件的布局、零件的材料和結構形狀滿足對溫度不敏感的要求;
2) 通過采用合適的溫控裝置或溫度控制使陀螺工作在一個恒定的溫度環境內;
3)通過熱力學分析和試驗研究的方法辨識出陀螺的靜、動態溫度模型,并依此進行溫度誤差補償。本文通過理論分析和試驗驗證,對現有陀螺儀溫控系統做研究和改進,大量數據表明:改進后的溫控系統有更好的辨識精度和更.高的可靠性。
1液浮陀螺溫控系統的組成和工作原理
液浮陀螺儀的溫控系統包括測溫電橋動態補償環節和功率放大級。
1)測溫電橋
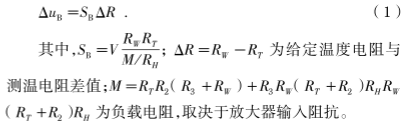
內外測溫鉑金串聯電阻Rr=Rc+Rf為交流電橋一臂,其余各臂由精密電阻R2,R3,Rw構成。Rw為工作溫度設定可調電阻,可微調給定溫度值。測溫電阻隨溫度變化引起電橋不平衡電壓△ug經放大后,其輸出電壓與工作溫差呈比例。平衡電橋如圖1。
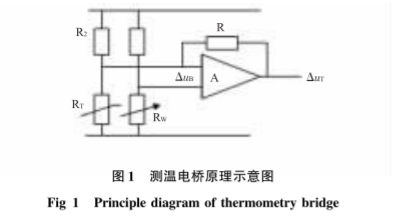
平衡電橋輸出電壓為
2)動態補償環節
為改善浮液溫控的動態特性,獲得最快的加溫時間和最小允許的超調,多采用微分、積分.比例校正環節K(s)。
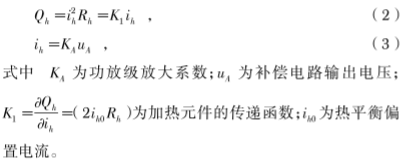
3)功率放大級與加溫
動態補償電路輸出,經功率放大轉換為加熱片的加溫電流,使加熱片的發熱量為
2液浮陀螺儀熱傳導模型
浮液的溫控精度和溫度場的均勻性和熱動態性能,主要取決于選擇測溫元件與加溫元件的類型以及在陀螺上的布局和溫控系統參數的選擇。
測溫元件用電阻系數穩定的鉑金絲,均勻分布繞在導熱絕緣片上,并黏貼于陀螺殼體外壁上。另一鉑金絲線圈置于浮液內直接敏感油溫。加熱元件采用高阻系數的鎳鉻片,將其加工成電熱絲片.片的兩面貼以耐溫絕緣傳熱的聚乙烯薄膜,用其硫化硅橡膠固化。加熱片卷貼于測溫片的外面,加熱絲厚度與寬度取決于加熱功率的大小,加熱絲的疏密取決于溫度場的分布。加熱片的外面有保溫盒磁屏蔽的鈹莫合金外罩。
為分析浮液溫度場,首先應建立陀螺熱傳導模型。設陀螺電機傳導到陀螺浮液的熱量為Qmf,Qh.k為自然對流到平臺帽罩的熱量;加熱片發熱量為Qh,經殼體傳人浮液熱量為Qu,傳到陀螺安裝界面的熱量為Qhp,經屏蔽單由空氣介質對流出去。陀螺熱的傳導除與傳導路徑的熱阻和熱容量有關外,還與作為溫控系統干擾源的環境溫度的變化有關。浮液的熱傳導如圖2所示。
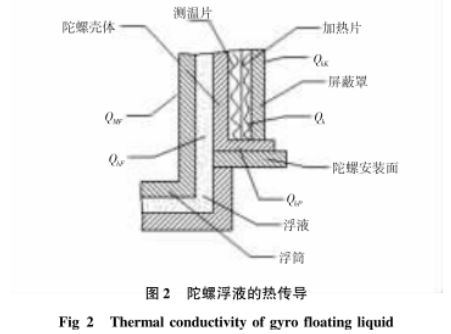
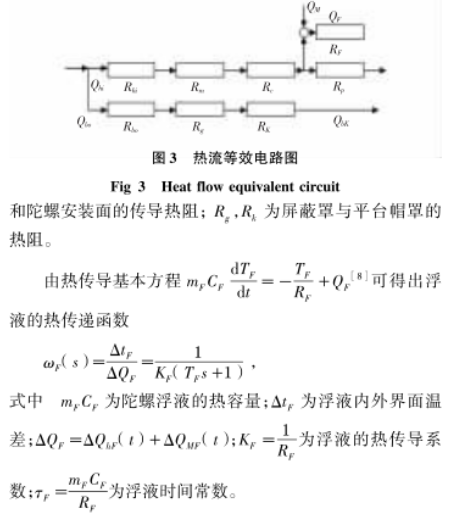
根據具體結構尺寸和材料計算出各節點間的熱阻系數,考慮浮液較大的熱容慣性,作出熱流圖的等效電路圖如圖3所示。
圖3中,Rhi,Rho為加熱片內、外絕緣導熱層的熱阻;R.為測溫片熱阻;Re為陀螺殼體熱阻;Rf,Rp為浮液對流熱阻
3溫控系統數學模型
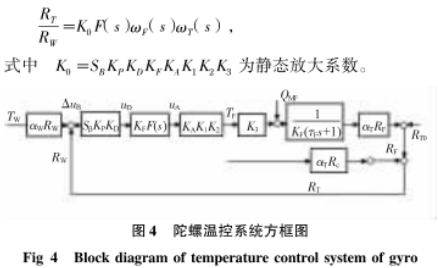
根據上述式(1).式(2).式(3)可以做出陀螺溫控系統的方塊圖“如圖4所示。
系統的開環傳遞函數如”下
S
B為電橋測溫靈敏度;Kp,KD,KF,F(s),KA為前放、解調、動態補償、電流放大級的傳遞系數;K1,K2,K3為加熱片、浮液外壁與內璧的熱導系數;aw,ar為Tw,Rr,的電阻溫度系數;Tw,Tf為要求的工作溫度與實際的控制溫度。
假定不用校正網絡,令F(s)=1,當采用熱敏電阻器串聯測溫時,Rr=Rf+Rc,并聯熱路的傳遞函數為

這相當于增加微分比例環節,改善了系統動態特性,這是因為外測溫絲比內測溫絲超前敏感溫度的變化,選擇為某一最佳值中,使動態性能較好10]。根據溫控特性要求,即可選擇系統的靜態參數和動態參數。
4實驗驗證
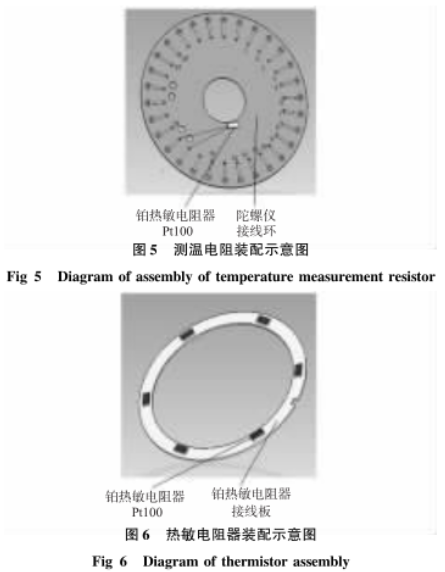
實驗主要對比現在天津航海研究所正在用的線繞熱敏元件和鉑熱敏電阻器的各項參數。根據上述對溫控系統的分析和長期試驗積累選擇了合適的n值,試驗所采取的溫控方式為:保留原測溫線圈,并在陀螺儀接線環背面接測溫電阻器P100作為新的測溫電阻器;保留原熱敏線圈,并在專門制作的接線片上串聯相應數量的熱敏電阻器P100,示意圖如圖5、圖6。
在原熱敏線圈和鉑熱敏電阻器二種工作方式下,分別采集測溫線圈和測溫電阻器的阻值,對比兩種工作方式下的溫控精度測漂精度和翻滾殘差,對比在兩種熱敏元件的工作方式下對陀螺儀的各種靜態動態性能的影響。
4.1溫控精度測試試驗
按照測試方案,分別對8只試驗陀螺儀兩種溫控狀態進行了8h的靜態溫控精度測試。采集8h測試數據,重復7次試驗,計算每次測試數據的標準方差,陀螺--次啟動連續測試的標準偏差σ,并用σ作為陀螺溫控精度的測試結果

從表1可以看出:作為溫控元件的熱敏電阻器和熱敏線圈具有相當的溫控精度。經計算,將熱敏線圈作為溫控元件的平均溫控精度為0.0098℃,將熱敏電阻器作為溫控元件的平均溫控精度為0.0096℃。
4.2翻滾試驗
將試驗陀螺儀按照正常測試程序進行平行極軸12點翻滾,翻滾的初始位置是:自轉軸SA指西,輸人軸IA指南。轉臺以每30°的增量進行斷續翻滾,并記錄每一-位置相應的反饋電流I,,采樣平均時間為1min。這樣,翻滾一周共有12個數據,用富氏分析法對所得數據進行處理。

同時采集測溫線圈和測溫電阻器阻值,將翻滾過程中所采集數據的標準方差作為溫度穩定性的標準,同時記錄翻滾殘差,翻滾7次,把每組標準方差值,翻滾殘差錄人試驗數據表格。翻滾數據結果統計如表2。
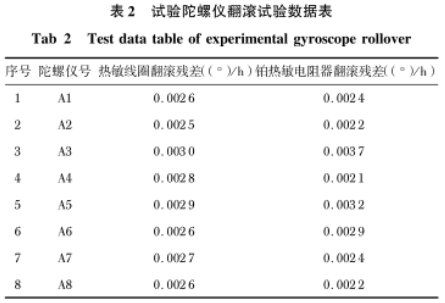
以上數據表明:在鉑熱敏電阻器和熱敏線圈兩種不同.元件的溫控狀態下,翻滾試驗具有相當的翻滾殘差。
4.3時間穩定性測試
表3是實驗陀螺儀分別采用熱敏線圈和鉑熱敏電阻器進行測試的陀螺儀時間穩定性。
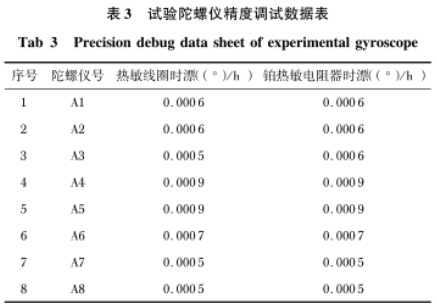
從以上試驗數據可以看出:采用鉑熱敏電阻器后,陀螺儀的時漂小于0.001°/h,沒有對其精度產生影響。
5結論
本文通過對液浮陀螺儀溫控系統的分析研究,得出了系統對熱敏元件的基本要求,鑒于長期使用的線繞元件可靠性較差的問題,本文對滿足溫控系統條件的熱敏線圈和鉑熱敏電阻器進行了一系列對比試驗,試驗結果表明:在保證系統溫控精度的前提下,鉑熱敏電阻器替代線繞熱敏元件具有一定的可行性,為液浮陀螺儀選擇合適的溫控元件提供了相應的依據。